Nel blog ci siamo sempre occupati di asteroidi, comete e bolidi, ma mai della strumentazione necessaria per le osservazioni astronomiche nell’ottico. Iniziamo a colmare questa “lacuna” prendendo in esame come si può caratterizzare un sensore digitale.
Il mercato dei sensori ottici in campo astronomico sta rapidamente evolvendo verso la sostituzione completa dei dispositivi CCD (Charge-Coupled Device) con quelli CMOS (complementary metal-oxide semiconductor). In entrambi i casi il sensore è formato da una griglia di elementi semiconduttori (photosite o pixel) in grado di accumulare una carica elettrica proporzionale all’intensità della radiazione elettromagnetica che li colpisce. Nel caso dei CCD la lettura della carica elettrica nei pixel avviene grazie a un apposito circuito esterno al sensore, per i CMOS il circuito di lettura si trova direttamente nel photosite. Da qui deriva la maggiore rapidità di download dell’immagine dei CMOS rispetto ai CCD. Tipicamente i sensori CMOS vengono utilizzati nelle videocamere e macchine fotografiche digitali. Per l’utilizzo in campo astronomico una delle caratteristiche più importanti di un CCD è la linearità ossia il segnale raccolto nel pixel è direttamente proporzionale all’intensità della radiazione incidente. Questa è una caratteristica auspicabile perché semplifica parecchio la determinazione della magnitudine ossia della luminosità del corpo celeste. Vale la stessa cosa per i CMOS? Vediamo come si può rispondere a questa domanda analizzando le caratteristiche del sensore CMOS che equipaggia la camera ASI 178 mm cooled della ZWO.
Test di linearità della 178 mm cooled
La ASI 178 mm è equipaggiata con il sensore IMX178 della Sony, un CMOS back illuminated avente 3096 x 2080 pixel quadrati da 2,4 micrometri di lato, convertitore analogico digitale a 14 bit (ossia 2 elevato alla 14-esima potenza = 16.384 livelli di grigio), efficienza quantica di picco dell’81% attorno a 500 nm, rumore di lettura dichiarato di 2,2-1,4 e r.m.s. e pixel con una capacità di circa 15.000 elettroni (Full Well). La camera è anche dotata di un sistema di raffreddamento Peltier a due stadi che le consente di arrivare a circa 35-40 °C sotto la temperatura ambiente. Queste sono le caratteristiche dichiarate dal costruttore, niente viene detto a proposito della linearità del sensore.
Per quanto possa sembrare strano, non è necessario riprendere immagini di campi stellari per la caratterizzazione del sensore (CCD o CMOS non importa), di una camera astronomica. Tutto quello che serve sono una serie di flat field presi a tempi di esposizione crescenti. Un flat è semplicemente l’immagine che esce fuori dalla camera puntando l’obiettivo del telescopio verso una superficie bianca uniformemente illuminata. Di solito i flat si usano per togliere l’effetto deleterio della vignettatura dell’obiettivo e l’ombra dei granelli di polvere, ma hanno più utilizzi di cui quello riguardante l’analisi del sensore è forse il meno conosciuto.
Il punto cruciale è che i flat devono essere ripresi con una sorgente di luce costante almeno sull’intervallo di tempo necessario alle misure. Per questo si può usare la classica “flat box” posta davanti all’obiettivo del telescopio, oppure semplicemente il soffitto della stanza o della cupola in cui è ospitato il telescopio. L’unica condizione è che la luminosità resti costante. Per assicurarsene basta riprendere dei flat con tempo di posa fisso e verificare che la luminosità media dei pixel nel centro dell’immagine resti costante.
Nel nostro caso la 178 mm è stata utilizzata sia con il software della casa madre, ASI Studio, utilizzando il tool per la ripresa degli oggetti deep sky, sia con il più noto Astroart. I test sono stati fatti in bin 2 alla temperatura costante di 10 °C usando due valori estremi del guadagno della camera: 0 (low) e 270 (high). Il valore del guadagno indica il fattore di amplificazione elettronica del segnale. I file fits salvati da entrambi i software di gestione sono a 16 bit ossia con 65.536 livelli di grigio. Questo risultato viene ottenuto via software dalla camera moltiplicando per 4 i valori dei livelli di grigio dei 14 bit nativi del sensore quindi, formalmente, sono state analizzate immagini a 16 bit. I tempi di posa sono stati scelti in modo tale che i flat avessero livelli di intensità da poche centinaia di ADU fin quasi alla saturazione a circa 60000 ADU. L’ADU o Analog-to-Digital Unit, è l’unità di misura per i livelli di intensità luminosa dei pixel. Fissato il tempo di posa sono stati ripresi 5 flat per farne l’immagine media. A ogni flat è stato tolto il corrispondente master dark, secondo le solite procedure di calibrazione.
Una volta ottenuti i flat bisogna caratterizzare i pixel in prossimità del centro ossia la regione non affetta dalla vignettatura dell’obiettivo. Il rettangolo dei pixel selezionati per la misura dovrebbe essere sempre lo stesso, ma anche un posizionamento “a occhio” può essere tollerato. La cosa che interessa è il valore medio del pixel in ADU e la relativa deviazione standard. Ogni software per l’analisi delle immagini astronomiche è in grado di fornire queste informazioni, come ad esempio il già citato Astroart. Per avere diverse misure e poter calcolare media e deviazione standard basta usare più sequenze di immagini oppure selezionare diversi rettangoli nell’introno del centro. Una volta fatte le misure ci si troverà ad avere una tabella di questo tipo:
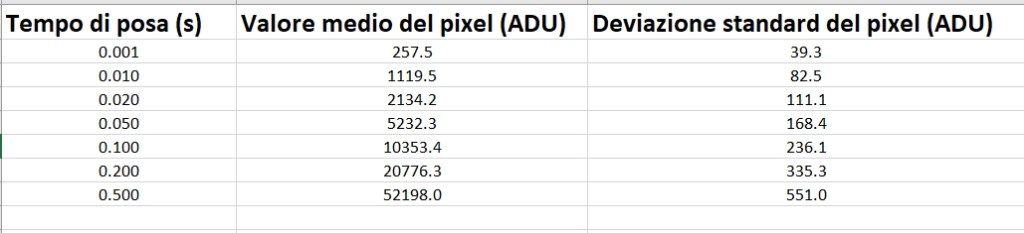
In questa tabella ci sono una buona parte delle informazioni che servono per caratterizzare il sensore. La Tab. 1 è solo un esempio delle diverse tabelle che si possono ottenere ed è relativa all’impostazione con il guadagno elevato, quella per il guadagno 0 è analoga, con valori più bassi dell’intensità del pixel e della deviazione standard. Per la verifica della linearità del sensore basta riportare su un grafico il valore medio del pixel in funzione del tempo di posa e fare un fit lineare ossia trovare la retta che passa più vicino possibile ai punti dati (vedi Fig. 1). L’equazione della retta sarà del tipo:
Intensità media pixel = A + B * (Tempo di esposizione)
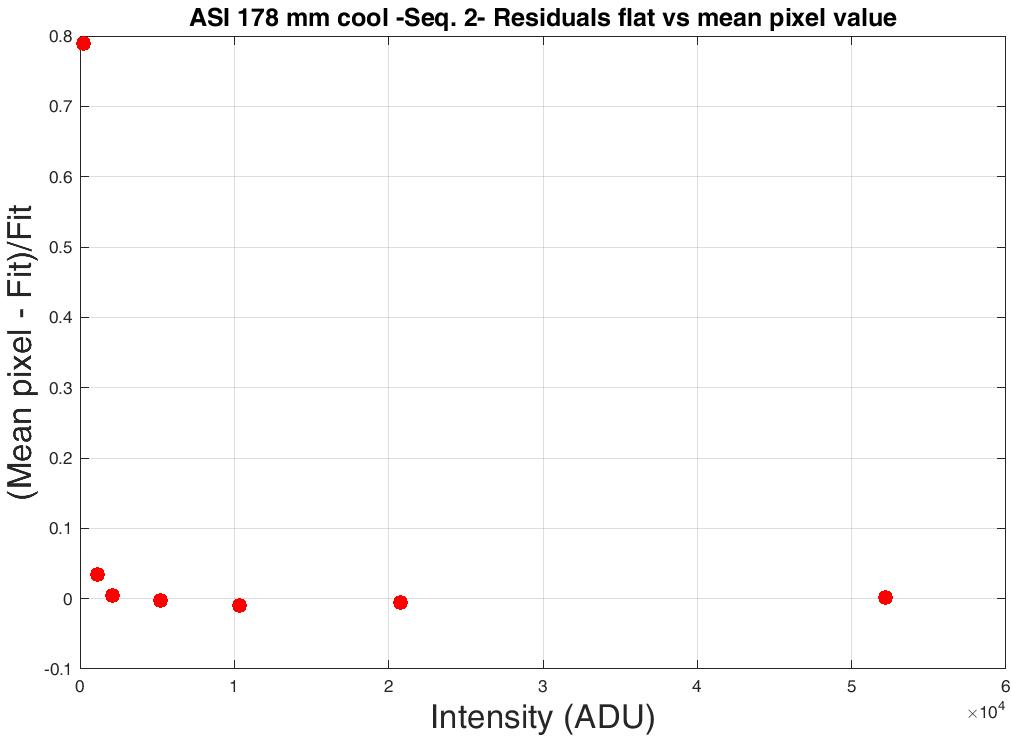
Le costanti A e B si troveranno come risultato dell’operazione di best-fit. I calcoli possono essere fatti con un foglio di calcolo come Excel oppure Calc di Open Office. Per vedere quanto bene i punti misurati dell’intensità media del pixel si adattino alla retta di best-fit conviene calcolare i residui ossia la quantità (valore misurato – valore best fit)/(valore best fit) in funzione del valore misurato dell’intensità media del pixel. Qualsiasi deviazione della linearità sarà subito molto evidente (Fig. 2). In base ai dati ottenuti si può dire che la linearità del sensore IMX178 è entro 2% fra 1000 e 56.000 ADU ed entro l’1% se si parte da 2000 ADU fino a 56.000 ADU. Un risultato analogo si ottiene per la configurazione a guadagno zero (vedi Fig. 3).


Misura del fattore di conversione e del readout noise
Una volta verificata la linearità della risposta del sensore si può procedere per ottenere il fattore di conversione F (ossia a quanti elettroni equivale un ADU) e il rumore di lettura dell’elettronica (RON, readout noise) espresso in elettroni. Il fattore di conversione è una caratteristica importante perché ci permette, dal numero di elettroni estratti e dall’efficienza quantica, di sapere quanti fotoni sono arrivati nel singolo pixel ossia di misurare il flusso della radiazione. Nei software fotometrici come MPO Canopus il valore del fattore di conversione della camera viene richiesto nei settaggi proprio per convertire il flusso da ADU in elettroni e poter così misurare la magnitudine di un asteroide dal confronto con il flusso noto delle stelle del catalogo usato.
Chiamiamo Sigma_T il rumore totale presente nei pixel dato dal contributo del rumore del segnale luminoso (Sigma_L), rumore termico (Sigma_D) e rumore di lettura dell’elettronica. Per avere quest’ultima quantità ci serve la deviazione standard del bias ossia del frame che si ottiene con tempo di posa zero (a telescopio tappato). In questo frame il segnale luminoso e quello termico sono zero e resta solo il rumore di lettura dell’elettronica dei singoli pixel. Come nel caso dei flat converrà riprendere diversi bias e farne la media. Selezionando il solito rettangolo centrale si potrà ottenere la deviazione standard dei pixel del master bias, chiamiamolo Sigma_B. Considerato che tutti i rumori (o incertezze) associate al pixel sono indipendenti fra loro, dall’analisi statistica sappiamo che il quadrato del rumore totale (espresso in elettroni) deve essere pari alla somma dei quadrati del rumore luminoso, termico e di lettura ossia:
Sigma_T^2=Sigma_L^2+Sigma_D^2+Sigma_B^2
Il quadrato della deviazione standard è detto anche varianza. L’assorbimento dei fotoni da parte dei pixel del sensore è un processo che obbedisce a una statistica di Poisson ossia non si sa quando avverrà la cattura del prossimo fotone, ma nel complesso la cattura avviene con un valor medio di fotoni assorbiti ben definito nel tempo. Lo stesso può dirsi del fenomeno di decadimento degli atomi radioattivi in un campione: non è possibile predire quando un singolo atomo decadrà, ma in media ci sarà un certo numero di atomi del campione che lo faranno. In processi di questo tipo la deviazione standard è uguale alla radice quadrata del valore medio, oppure si può anche dire che il quadrato della deviazione standard coincide con il valore medio. Per questo motivo si può scrivere:
Sigma_L^2=Light
Dove Light è il segnale luminoso espresso in elettroni. Visto che i valori del segnale in elettroni non lo conosciamo dobbiamo passare in ADU usando il fattore di conversione F che ci fa passare da ADU ad elettroni. L’equazione del rumore totale di cui sopra la possiamo quindi riscrivere così:
F*F*sigma_T^2=F*light + F*F*Q da cui dividendo ambo i membri per F*F: sigma_T^2=(1/F)*light + Q
Dove con Q abbiamo espresso la somma quadratica in ADU del rumore termico e del bias, light è il segnale in ADU e sigma_T è l’incertezza totale del pixel in ADU ossia la terza colonna della Tab. 1. Se si calcola la varianza dai dati di sigma_T riportati in Tab. 1 e si riporta in un grafico la varianza in funzione del segnale medio del pixel in ADU si vede che esiste proprio una relazione lineare del tipo (vedi Fig. 4):
Varianza = K*light + Q
Qui K è una costante il cui reciproco è proprio il fattore di conversione F ossia F=1/K. Quindi facendo il best fit lineare della varianza in funzione del valore medio del pixel si può ottenere il fattore di conversione e sapere a quanti elettroni equivale un ADU. Per fare sì che la quantità Q resti costante conviene usare tempi di esposizione brevi in modo tale che il rumore termico non aumenti in modo apprezzabile.
Nel caso del sensore IMX178, con il guadagno a 0 si trova circa F = 0,7 e/ADU, mentre nella configurazione ad alto guadagno si trova circa F = 0,2 e/ADU. Quindi visto che l’immagine arriva fino a 65536 ADU, formalmente ogni pixel può contenere nel primo caso circa 46.000 elettroni, nel secondo circa 13.000 elettroni (visto che il sensore è a 14 bit nativi i valori reali sono 46.000/4 = 11.500 elettroni e 11.000/4 = 3250 elettroni). In sostanza quando si aumenta il guadagno del sensore si abbassa la capacità dei pixel di contenere elettroni e quindi si aumenta la sensibilità ai bassi livelli di illuminazione. Tutto bene dunque? Non proprio perché c’è uno scotto da pagare: un aumento del rumore di lettura dell’elettronica. Nel caso di guadagno zero per il master bias è stato trovato sigma_B = 2 ADU, nel caso di guadagno alto sigma_B = 38 ADU. Nella configurazione a basso guadagno il rumore in elettroni sarà dato da RON = sigma_B * F = 2 * 0.7 = 1,4 e in r.m.s., mentre in quella in alto guadagno si avrà RON = 38 * 0,2 = 7,6 e in r.m.s. In sostanza nel passaggio fra le due configurazioni il rumore di lettura aumenta di un fattore 5. A parità di segnale quindi, se nella configurazione a guadagno 0 c’è un segnale S = 1000 ADU quindi con un rumore totale dato da sqrt(1000 + 2*2) = 32 ADU e un rapporto segnale/rumore SNR = 30, nella configurazione ad alto guadagno SNR = 20 con un decadimento della precisione fotometrica.

Il segnale di buio
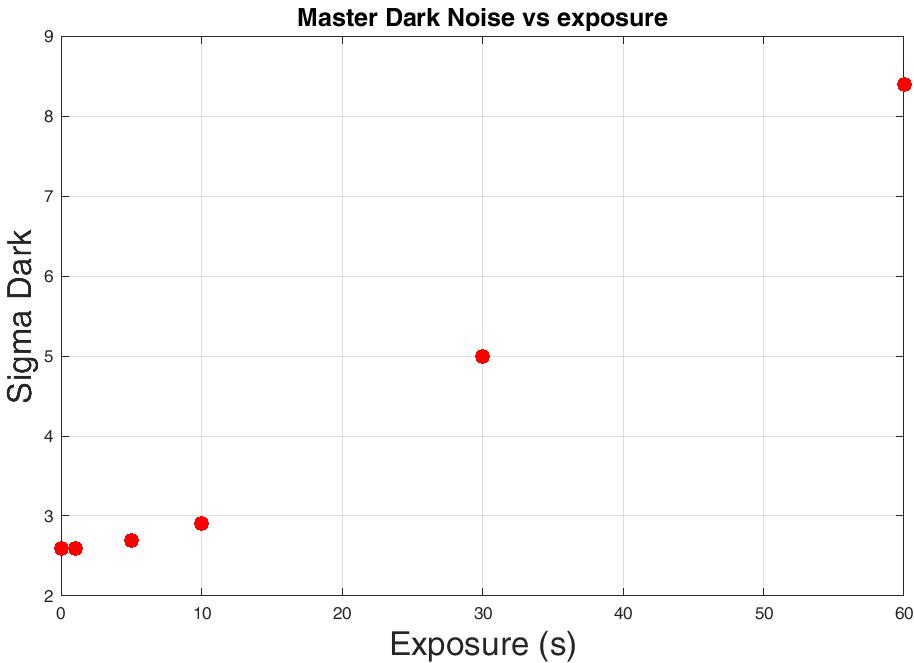
Il segnale di buio è dovuto agli elettroni termici che vanno a occupare il pixel e che vengono letti dall’elettronica pur non essendo dovuti all’arrivo di un fotone. Dall’analisi dei dark frame ossia delle immagini che si ottengono, a temperatura fissata, impostando un tempo di posa e tappando il telescopio risulta un segnale di buio estremamente contenuto, quasi indistinguibile dal bias frame e che non aumenta in modo sensibile all’aumentare della posa. Quello che aumenta è il rumore del dark frame che partendo da 2,6 ADU per un’esposizione di 0,05 s (un valore molto vicino a quello del master bias) a 60 s arriva già oltre 8 ADU (vedi Fig. 5). Per questo motivo, quando abbiamo misurato il fattore di conversione F, si diceva che per mantenere costante il rumore termico conviene fare misure con tempi di esposizione brevi come quelli riportati nella Tab. 1. In ogni caso la temperatura del sensore viene mantenuta senza difficoltà entro il decimo di grado, quindi non è un problema ottenere dei master dark frame per la corretta calibrazione delle immagini.
Il sensore è affetto dall’amplifier glow su almeno tre dei 4 angoli: si tratta di un segnale spurio generato dall’elettronica dalla camera stessa. Non rappresenta un grosso problema perché si elimina quando si sottrae il master dark frame, anche se ovviamente la regione del sensore dove era presente il glow resta un po’ più rumorosa del resto dell’immagine.

Conclusioni
In questo articolo è stato caratterizzato il sensore CMOS IMX178 che equipaggia la camera ASI 178 mm cooled. La linearità è stata verificata nelle due configurazioni a guadagno 0 e guadagno alto (270). In entrambi i casi la risposta appare lineare entro l’1% e fino a circa 56.000 ADU a patto che l’intensità minima del pixel sia superiore a circa 2000 ADU. La camera, pur essendo a 14 bit, fornisce immagini a 16 bit con fattori di conversione, rispettivamente, di 0,7 e/ADU e 0,2 e/ADU. Nel primo caso il rumore di lettura dell’elettronica risulta di 1,4 e in r.m.s., mentre nel secondo sale a 7,6 e in r.m.s. Per la fotometria è consigliabile la configurazione a guadagno 0 mentre per l’imaging deep sky, dove è importante riuscire a rilevare i deboli dettagli di nebulose e galassie, è preferibile la configurazione ad alto guadagno.